Radial menu on ROS1 for quick, accurate and intuitive selection by a joystick from 10+ items
- ROS Kinetic on Ubuntu 16.04
- ROS Melodic on Ubuntu 18.04
- ROS Noetic on Ubuntu 20.04
- Subscribe both joy and menu state messages using message_filters::TimeSynchronizer, watch which menu items are selected and process the joy messages when the menu is disabled (i.e. the menu does not own the joy messages). See an example node graph below or example_teleop_node.cpp. The teleop_node in the graph can be replaced to your node.

- Updates radial menu state based on joystick input
joy (sensor_msgs/Joy)
menu_state (radial_menu_msgs/State)
- The stamp in a message is copied from the source joy message
menu_description (string, required)
- Tree structure of the menu in xml format like below
<!-- A simple example -->
<!-- An element must have the attribute 'name'. -->
<!-- The 'name' of the root element indicates the menu title. -->
<item name="MoveCmd">
<!-- An element can have child elements -->
<item name="Front" />
<item name="Left" />
<item name="Back" />
<item name="Right" />
</item>
<!-- Multiple root elements are not allowed --><!-- A complex example -->
<!-- An element can optionally have the attribute 'display'. -->
<!-- Possible values are; -->
<!-- * 'name' (default): displays the item name -->
<!-- * 'alttxt': displays an alternative text -->
<!-- * 'image': displays an image -->
<item name="Reboot" display="alttxt" alttxt="">
<item name="Base" display="image" imgurl="package://radial_menu_resources/images/base.bmp">
<item name="Wheels" display="image" imgurl="file://Photos/wheels.png" />
<item name="Cameras">
<item name="Front" />
...
</item>
</item>
<!-- An element can optionally have the attributes 'rows' and 'row'. -->
<!-- In the example below, the item 'Arm' will have child items -->
<!-- ['LEDs', null, 'Cameras', null, 'Motors', null]. -->
<!-- Or it defaults to ['Motors', 'Cameras', 'LEDs'] with no attributes. -->
<item name="Arm" rows="6">
<item name="Motors" row="4" />
<item name="Cameras" row="2" />
<item name="LEDs" row="0" />
</item>
</item>~allow_multi_selection (bool, default: false)
- If false, current selected items will be deselected when a new item is selected
~reset_on_enabling (bool, default: false)
- If true, current selected items will be deselected when enabling the menu
~reset_on_disabling (bool, default: false)
- If true, current selected items will be deselected when disabling the menu
~auto_select (bool, default: false)
- If true, the last pointed item will be autonomously selected. Disable the menu before unpoint not to select.
~enable_button (int, default: 1)
- Button to keep enabling the menu
- PS4's circle button as default
~select_button (int, default: 5)
- Button to select or deselect an item, or descend the menu
- PS4's R1 button as default
~ascend_button (int, default: 4)
- Button to ascend the menu
- PS4's L1 button as default
~pointing_axis_v (int, default: 1)
- Vertical axis to point an item
- PS4's LEFT Y axis as default
~pointing_axis_h (int, default: 0)
- Horizontal axis to point an item
- PS4's LEFT X axis as default
~invert_pointing_axis_v (bool, default: false)
~invert_pointing_axis_h (bool, default: false)
~pointing_axis_threshold (double, default: 0.5)
- Threshold value of axis input to enable pointing
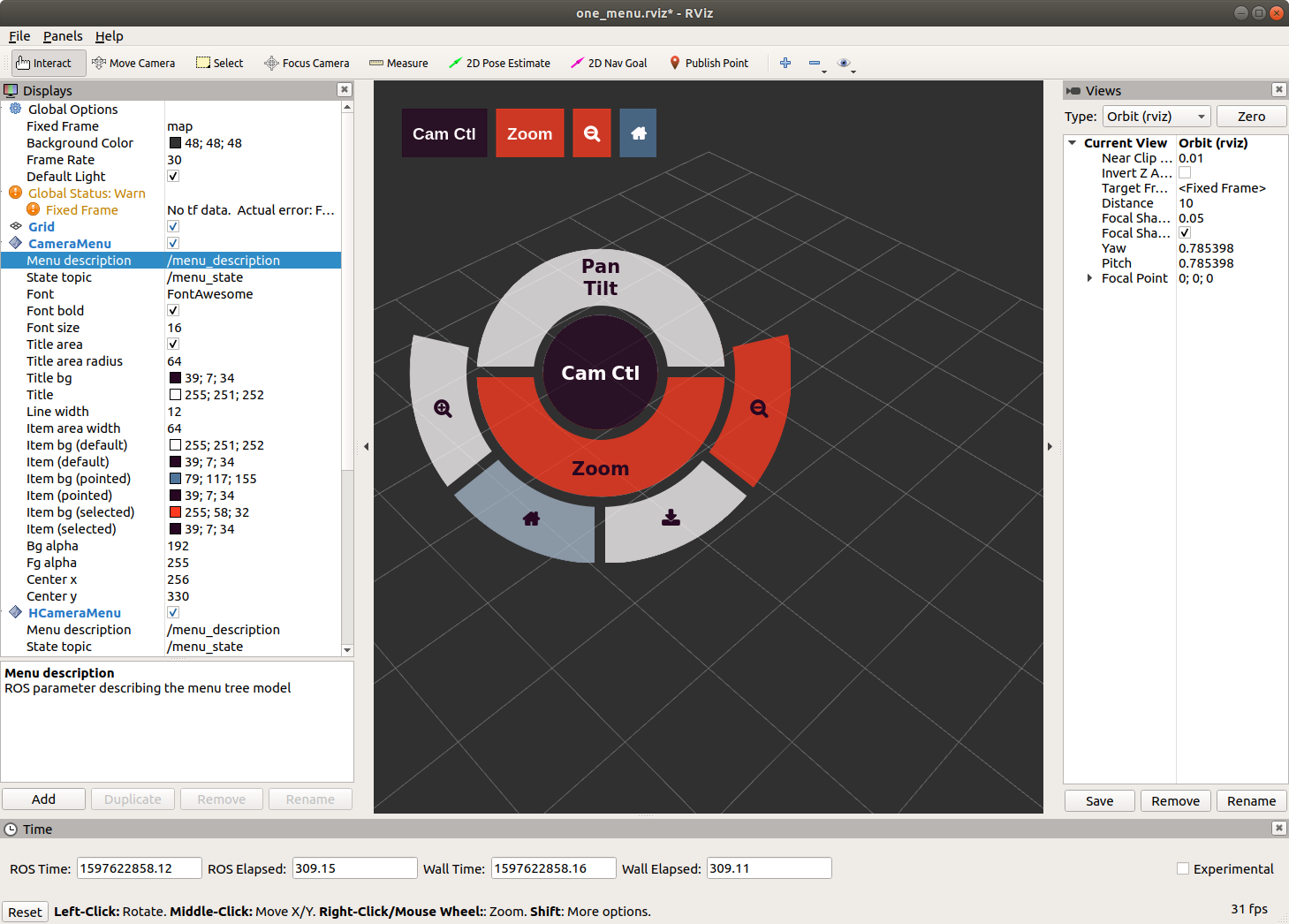
- Visualizes subscribed menu states as a radial menu
- Shows the menu when the menu is being enabled
- Visualizes subscribed menu states as a single-lined menu
- Always shows the menu
- Contains an implementatin of menu tree model, which is commonly used in the backend and rviz packages
- Defines State message type
- A meta-package depending radial_menu_backend, radial_menu_model, radial_menu_msgs and radial_menu_rviz
- Provides a full example which requires a joystick and a Rviz frontend example which does not
- Examples use the font 'FontAwesome' to display emojis. Install it by
sudo apt install fonts-font-awesome